
When an earthquake, fire, a terrorist attack or any other natural or manmade disaster strikes, First Responders (FR) must act quickly and effectively. Any threat to their safety restricts their operational capacity and their ability to save lives. The INGENIOUS project aims to protect and assist the First Responders by developing a Next Generation Integrated Toolkit (NGIT) for Collaborative Response. This toolkit is made up of several components, e.g., smart uniforms, smart boots, and different aerial drones.
The Robotics and Control group at SINTEF Digital is responsible for developing one of these tools: a micro indoor drone. All the components are meant to be integrated to deliver enhanced information to the end users working on the field.
The NGIT will comprise a multitude of the tools and services required:
1. for enabling protection of the first responders (FRs) with respect to their health, safety, and security.
2. for enhancing their operational capacities by offering them with means to conduct various response tasks and missions boosted with autonomy, automation, precise positioning, optimal utilisation of available resources and upgraded awareness and sense-making.
3. for allowing shared response across FR teams and disciplines by augmenting their field of view, information sharing and communications between teams and with victims.
The development at the Robotics and Control group at SINTEF Digital
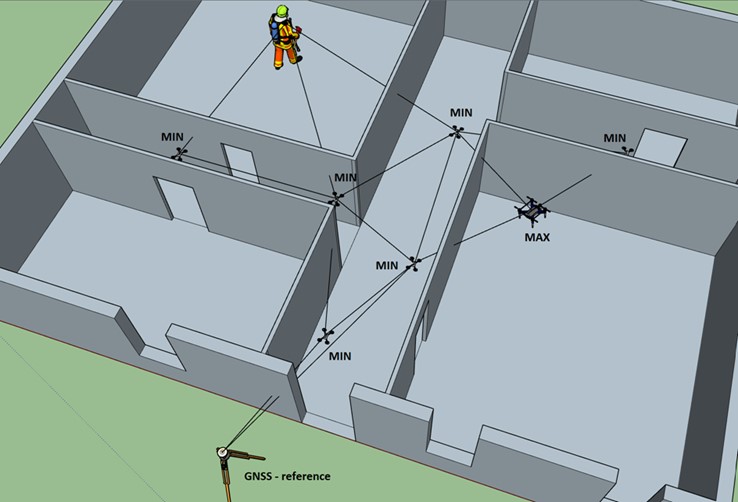
The Robotics and Control group at SINTEF Digital focuses on the development of one component of the toolkit, the micro indoor drones (MINs). The MINs are one of the different autonomous aerial vehicles that are being developed in INGENIOUS. The main goal of the MINs is to support the localisation of First Responders moving in indoor dangerous and GNSS (Global navigation satellite system)-denied environments. The idea is to use the MINs to build an indoor mesh network such that they could be used as beacons to obtain the position of First Responders carrying a specific device or tag. In simpler words, the MINs will aid the indoor localization of First Responders operating in semi-collapsed and dangerous, GNSS-denied buildings and must self-deploy by navigating autonomously in the environment (Figure 1).
As platform for the MINs, we have chosen to use the Crazyflie 2.1 drones from Bitcraze.
The Crazyflie 2.1 is a great platform for the INGENIOUS purpose since it is completely open source, and it comes with a series of off-the-shelf sensors that fit the needs of the INGENIOUS project. There is an ultra-wide band (UWB) module available which can be used for the localisation of the FR in the mesh network created by the MINs. There are also two modules with laser sensors which can detect obstacles in proximity of the micro drone and that can be used for navigation and obstacle avoidance purposes.
The first year
The first year of the project was focused on the development of the software to improve peer-to-peer communication of the drones and to tweak some functionalities of the UWB module of the Crazyflie. We also tested the initial localisation performance of the UWB modules in ideal conditions, that is, positioning the MINs in known positions in the environment and using them as reference points for calculating the position of a moving person (an FR).

Furthermore, we focused also on the development of high-level exploration strategies for the self-deployment of the MINs and in parallel we tested the localisation performances of the MINs in less ideal conditions, which means we did not position the MINs but let them fly to a given position and then using them as reference points to calculate the position of a moving person (an FR). Of course, in the preliminary tests, not all goes well.
The current status
However, now we are trying to get back on the right track, and we are becoming more skilled about flying.
Last May we managed to run a remote demo to which several of the partners and end-users of the project participated. We succeeded to let the MINs autonomously fly to some random location in the room and build a mesh network to localise and track the motion of a person moving within the mesh network.
The next steps
We have been working the whole summer to prepare a larger demo in Spain in October. There we will meet several partners of the project again after working separately for more than one year. For the first time we will have many components of the INGENIOUS toolkit at the same location and for the first time they will try to interact with each other.
Do you have any questions related to the post or the INGENIOUS project? Please feel free to contact Research Scientist Klaus Ening at SINTEF.









Comments
Claudio, that was a fantastic set of tools! It’s thrilling to think about how MINs will help first responders as they become a vital element of their arsenal. I believe that MINs can be a significant asset because they have a variety of sensors that will assist firemen in better controlling emergency situations. In addition, by collecting real-time data about hotspots, these sensors will aid in acquiring situational awareness.