

A shortened, Norwegian version of the article was originally published in Norsk Fiskeoppdrett (reference below).
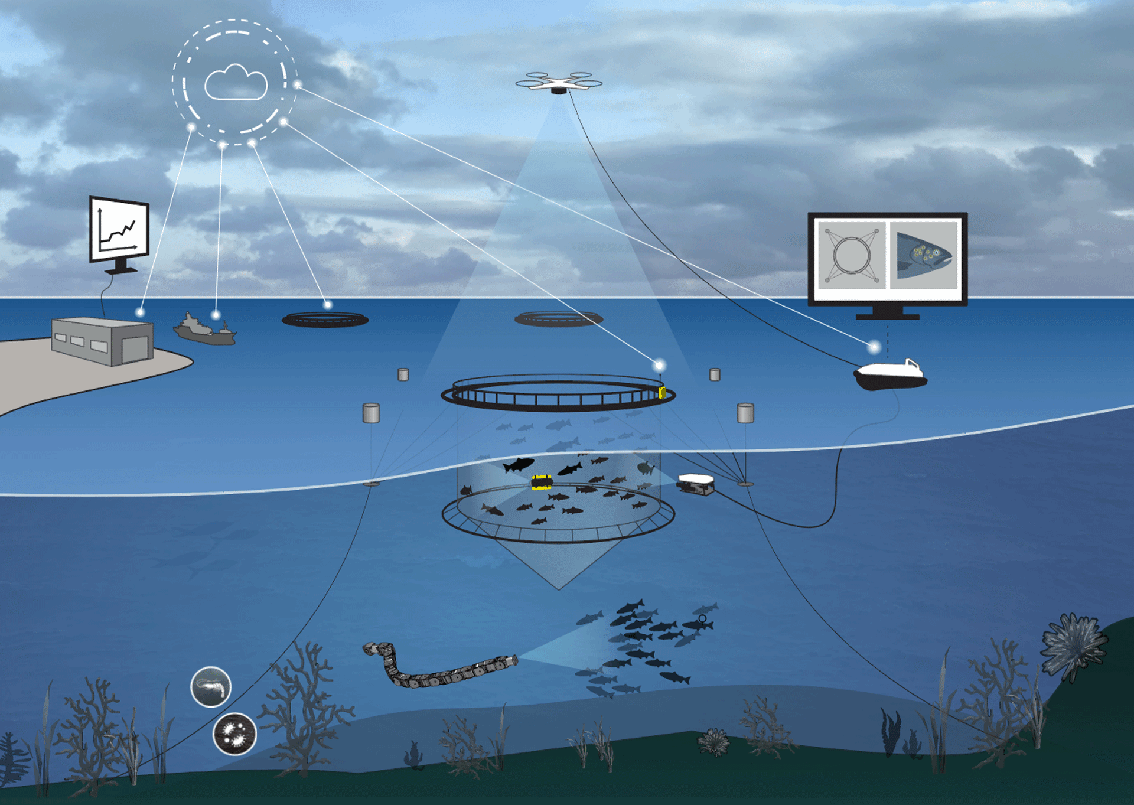
Aquaculture is an important global contributor to the production of seafood for human consumption. However, this industry is also known for a substantial HSE risks and a high frequency of work-related injuries. Consequently, increasing the automation level of high-risk operations within aquaculture could lead to economical as well as social and ethical benefits. Increased automation can contribute to improving the level of control humans have over aquaculture operations by facilitating increased use of technological solutions and unmanned underwater vehicles (UUVs). To address several of these challenges, it is crucial to develop future solutions where the UUV largely operates on its own. A high level of autonomy will also ensure that data on the conditions of fish in farms can be obtained with a higher degree of repeatability and objectivity, improving data quality. To target these challenges, the advanced full-scale infrastructures of SINTEF Ocean and its newly established SINTEF ACE-RoboticLab aims to be the pioneer for developing both basic and applied research on autonomy and robotics with the overall target being to contribute increasing efficiency and objectivity during daily operations in fish farms, and thus provide solutions that will contribute to addressing the current challenges in the aquaculture domain (Figure 2).
As with other maritime sectors, the aquaculture industry is facing major challenges related to HSE in addition to the industry specific challenges such as securing fish welfare during daily operations, preventing escapes of farmed fish, parasite and disease control, release of nutrients and feed spills, precise estimation of biomass by optimising fish feeding and reducing feed waste (e.g. food costs represent about the 60% of the total production costs), prevention of sea lice, minimising the effects of overcrowding, mortality, structural damages due to harsh weather conditions, biofouling prevention, objective environmental conditions monitoring, etc. In order to address these challenges, reach the demands for food production and contribute to the efficiency and optimisation of production in fish farms, new technological solutions should be adapted. In particular, new tools, sensors, machines, algorithms and methods should be investigated and developed to secure optimal conditions for the fish and the environment, and thus contribute to sustainable development of the industry. In addition, we’re seeing a trend of moving fish farms from traditional sheltered farming locations to more exposed locations, and therefore potential new challenges need to be addressed.
Recently, there has been increasing interest in the scientific community and in fish farming companies to increase precision in fish farming operations. Machine vision techniques have been investigated for fish and structure condition monitoring, camera systems have been developed for high-quality data acquisition, fish tags and acoustic telemetry methods have been developed and tested, detection methods for lice, wounds and damages in fish, and methods for biofouling inspection are investigated, delousing machines have been developed, research on biomass estimation techniques have been conducted and different tools for biomass estimation based on cameras or sonar are developed. Automated feeders and underwater vehicles have been adapted for daily operations (e.g. net inspection, hole detection, net cleaning, etc.) in fish farms, however, most of the operations in fish farms are still experienced based and mostly conducted using either divers or ROVs under the command of experienced operators. Fully autonomous operations in complex and dynamically changing environments such as fish farms can be realized by extending the use of and enabling UUVs to autonomously operate in them.
Based on success stories from other marine industries, the use of UUVs is a possible solution to this challenge. However, unlike most other ocean-related industries, aquaculture operations (and operations in other areas such as fisheries, environmental protection and stock management) need to take biology into account. This introduces a series of extra challenges.
Challenges resulting from coexistence
Irrespective of the production principle, aquaculture farm facilities need to be maintained through day-to-day management routines to sustain the general production process, and more discrete operations to counter events that occur occasionally. To achieve the desired level of control over the production process in an aquaculture farm, it is essential that the required routines and operations are conducted with sufficient precision to make the impacts on the production process predictable.
Adaptation of autonomous and robotic solutions become vital to addressing the challenges in the aquaculture industry towards three overarching goals of 1) low production costs, 2) improved efficiency and 3) increased profitability and sustainability. Therefore, we see that there is a general trend in the aquaculture industry of shifting production methods from manual operations and experience-based reasoning, towards a more objective approach using intelligent sensors in combination with mathematical models, decision support and autonomous systems in different stages of production. However, the use of non-proper technological tools and immature automation levels can lead to fatal consequences, loses and damages and this cannot be acceptable when we are dealing with operations in a highly complex and dynamically changing environment (i.e. interaction with living fish, deformable flexible structures and harsh environmental conditions). This harmonises with the currently emerging Precision Fish Farming (PFF) concept developed in SINTEF Ocean, which describes how innovative technologies and automation principles may be used to industrialise, digitise and improve operations in fish farming. It also works together with the development of the SINTEF ACE – RoboticLab, aiming to create innovative tools and autonomous solutions to improve precision and efficiency in the aquaculture segment.
The PFF concept seeks to address this challenge for sea-based fish farming through increased application of technological solutions and automation principles. A key element in the PFF concept is to automate the ”Act” stage in conducting operations at fish farms, which is the phase where one seeks to impact the fish population through some kind of external action or stimuli. For most operations this will include actions that are conducted beneath the surface, suggesting a need for underwater vehicles. Although PFF was developed with intensive fish production in mind, the need for underwater vehicles will be similar in other industrial segments conducted in the marine environment such as kelp and mussel production.
New knowledge on autonomy and robotic systems is constantly emerging from research, resulting in a continuous expansion of operational limits and potential usage areas of unmanned underwater and surface vehicles in several different applications (e.g. mapping, monitoring, inspection and intervention) in different industrial segments (e.g. oil and gas, shipping and conservation/ oceanography) and aquaculture. Since the external environment a robotic system faces in an aquaculture situation differs from that encountered in conventional vehicle operations, the Aquaculture Operations and Robotics group in SINTEF Ocean aims to address the challenges that come with realising autonomous operations in complex and dynamically changing environments. The group also works to outline how robotic systems may be enabled to adapt their actions by interacting with fish, deformable flexible structures and unpredictable environmental disturbances.
SINTEF ACE
SINTEF ACE (Aquaculture Engineering) is a knowledge and infrastructure hub for aquaculture technology research and development as well testing, demonstration, and documentation, with a focus on the interaction between biology and technology. SINTEF has research licenses for industry-scale salmon production, and this allows the offering of a combination of industry-scale facilities for salmon farming and flexible technology test sites at different exposure levels, while the primary focus is the on-growing stages of salmon in exposed sea sites (Figure 1). The infrastructure consists of salmon farming sites at four locations off the coast of Mid-Norway, allowing for experiments at different degrees of exposure, and different production cycles (time of year for deployment of fish). SINTEF ACE is integrated in the SINTEF e-Infrastructure for secure and controlled access to laboratory facilities, allowing e.g. on-line access to sensors and actuators, and remote configuration, monitoring and operation of equipment.
This full-scale research and test facility is established in order to meet industrial requirements, and to facilitate the implementation of scientific results. Hence, it bridges the gap from laboratory-scale experiments to the application of new scientific knowledge in an industrial production. ACE merges knowledge and technology from a wide range of disciplines into a single large-scale environment, adding the necessary operation, management and engineering aspects in order to put the results into a realistic context that is relevant for its application. Consequently, the current services meet the strong interest from education, research and industry in the field of sea-based salmon farming technology.
SINTEF ACE-RoboticLab: Autonomous and Robotic Aquaculture systems Laboratory
Research on autonomy and robotic solutions in the Aquaculture Operations and Robotics group of SINTEF Ocean targets the development of dedicated solutions for the aquaculture industry and thus aims to address the industry’s challenges for optimal and sustainable production. Therefore, as a part of the SINTEF ACE infrastructure hub, SINTEF Ocean recently established the SINTEF ACE-RoboticLab which aims to create innovative tools and autonomous solutions which expand the ability of the aquaculture industry and improve precision and efficiency in the aquaculture segment. This will in turn contribute to making them more sustainable in terms of reducing feed spills and other environmental impacts. To accomplish the vision of the lab, we pursue projects focused on autonomous and robotised solutions applied to the aquaculture industry. Our team’s vision is to create autonomous intelligent systems capable of long-term autonomous operations in unknown, complex and dynamically changing environments in the aquaculture industry. Our group performs interdisciplinary research linking the technology and biology fields to make sure that the engineering solutions match the biological perspectives (Figure 3).

One of the main goals of SINTEF ACE-RoboticLab is to create a team that breaks new ground and defines new avenues in autonomous solutions adapted to the aquaculture industry. Our dedication is to introduce and develop innovative solutions that will be able to operate in any environment and in interaction with the biomass under any possible conditions, while performing demanding aquaculture operations. The SINTEF ACE-RoboticLab team is therefore building a research team that integrates and advances a diversity of skills to carry out interdisciplinary research that combines technology and biology. The SINTEF ACE-RoboticLab research group addresses the challenges related to the development of autonomous technological solutions and control of systems that adapt to different situations and cope with an uncertain and dynamically changing environment. With a large focus on interdisciplinary research linking the fields of technology and biology, we perform fundamental research on the modelling of UUVs, aquaculture structures, fish behaviour and environmental disturbances, and on advanced control strategies for autonomous navigation and exploration of unmanned underwater and surface vehicles operating in dynamically changing environments. Therefore, we are building a research team that has both strong theoretical and practical competence that targets the development of software and hardware for remote and autonomous inspection and intervention of aquaculture operations. The team aims to provide technical solutions for digitalisation in the fish farming industry by planning and executing demanding field demonstrations in the SINTEF ACE facilities.
The SINTEF ACE – RoboticLab has close collaboration with NTNU and other national and international research collaborators. The team has been involved in running a variety of projects targeting the development of methods and robotic solutions for autonomous operations in fish farms (to name few of them: CHANGE, NetClean 24/7, Autosmolt2025, RACE-Fish Machine Interaction, RACE Digital Cage, SalmonInsight, Indisal, Crowdquard, CageReporter, Artifex, Bioracer, Sensordrone, MerdROV and several others). In addition to the SINTEF ACE facilities, our lab has access to the Flume Tank in Hirtshals, Ocean Laboratory, Towing Tank, and Marine Cybernetics Laboratory to test the developed solutions in a lab environment before the full-scale demonstrations in SINTEF ACE. We own and use a variety of robotic systems including aerial, surface and underwater vehicles. In addition, the group contributes to the development of new, dedicated robotic systems suitable for operating in fish farms. Aquaculture Robotic Simulation Framework has also been developed in our group based on the FhSim – Simulation of Marine Operations and Systems, which features a large collection of mathematical models including ships, fishing trawl systems, aquaculture net cages, closed containment systems, fish behaviour and energetics, feeding systems, remotely operated vehicles (ROVs) and more (www.fhsim.no). We have a very close collaboration with the SINTEF ACE – Facilities and resources for Precision Fish Farming (PFF), and technology for better fish welfare to secure developing technological solutions that match the biological perspectives.
Support from the Research Council
From a technical point of view, the goal of establishing the SINTEF ACE – RoboticLab is to contribute to making operations in the aquaculture industry more efficient by using different types of autonomous concepts and robotic systems. We aim to develop new knowledge and technology for the underwater robotics systems of the future, where these systems must coexist and cooperate with living fish and flexible structures during operations. To this end, we have recently been granted support from the CHANGE project from the Research Council of Norway (FRIPRO – Young Researcher Talent program) that targets fundamental research and a novel research area in addressing the challenges of using autonomous underwater robots in ‘application-realistic’ environments. The CHANGE project aspires to create a turning point for autonomous underwater operations in dynamically changing environments. By incorporating biological parameters (i.e. fish behaviour) into the mathematical models, this interdisciplinary approach will provide a foundation for the resident underwater robotics systems of the future and thus enable them to operate in adaptation to live fish. This impact will be expressed both in the short term by enabling new research activities, and in the long term by resulting in innovations that help industries to improve the safety and efficiency of using robotics systems in demanding operations.
References
Føre, M., Frank, K., Norton, T., Svendsen, E., Alfredsen, J.A., Dempster, T., Eguiraun, H., Watson, W., Stahl, A., Sunde, L.M., Schellewald, C., Skøien, K.R., Alver, M.O, Berckmans, D., 2018. Precision fish farming: A new framework to improve production in aquaculture, Biosystems Engineering 173, Pages 176-193.
Su, B., Reite, K.J., Føre, M., Aarsæther, K.G., Alver, M.O., Endresen, P.C., Kristiansen, D., Haugen, J. Caharija, W. and Tsarau, A., 2019. A multipurpose framework for modelling and simulation of marine aquaculture systems. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE 2019), Glasgow, Scotland.
Original article in Norwegian:
E. Kelasidi, H. B. Amundsen, K. Frank, W. Caharija, B. Su, M.O. Pedersen S. J. Ohrem, L. M. Sunde, SINTEF ACE RoboticLab, Norsk Fiskeoppdrett, 2021









Comments
Thank you very much!! For our team is important to combine biology and technology in order to introduce and develop optimal solutions dedicated to aquaculture Industry. More activities of our group can be found in our website: https://www.sintef.no/en/expertise/ocean/sintef-ace-roboticlab/
What an exciting read! The integration of robotics to enhance efficiency and minimize risks is a testament to innovative thinking and forward progress. Embracing cutting-edge technology not only streamlines operations but also showcases a commitment to the safety and well-being of the workforce. Your insights into how robotics can revolutionize industries are both enlightening and inspiring. Kudos to your team for taking bold steps towards a more efficient and safer future. Looking forward to seeing more industries benefit from such transformative solutions! ??? #InnovationInAction #EfficiencyThroughTech