

In the first week of summer, a dynamic team of robots, researchers, students, and engineers in SFI Harvest and AUR-Lab embarked on a mission to sample zooplankton off the coast of Mausund, Norway.
But how was this possible?
Virtual robotic networking

The answer lies in an intricate virtual network, advanced satellite communication, and the seamless cooperation of autonomous robotic systems both on and below the ocean surface.
Coupled with the expertise of researchers in fields such as robotics, adaptive sampling, underwater acoustics, and particle imaging, the campaign was a demonstration of cutting-edge technology in marine science.
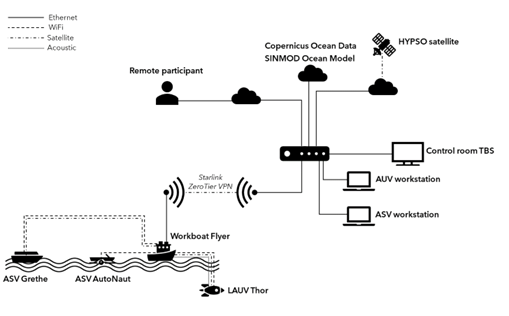
The core of these operations lay in the collaboration between NTNU’s Autonomous Surface Vehicles (ASVs), Grethe and AutoNaut, and the Light Autonomous Underwater Vehicle (LAUV), Thor.
These robots, supported by their operators and researchers, formed an integrated system for detecting and analysing zooplankton aggregations.
Robots communicating
Grethe and AutoNaut mapped the area with echosounders and used a neural network to pinpoint the locations and depths of zooplankton layers. This critical information was then relayed to Thor, which dived into the depths to capture high-magnification particle images and quantify the individual zooplankton particles.
Using echosounder data from Grethe, particle images, and utilizing adaptive sampling strategies, Thor could act like a sniffer dog, aiming for the most promising zooplankton hotspots.
This targeted approach not only enhanced the efficiency of the sampling process but also ensured that the data collected was of the highest quality.

On the ground – or rather, at sea – the field engineers prepared and deployed the vehicles.
Remote operation
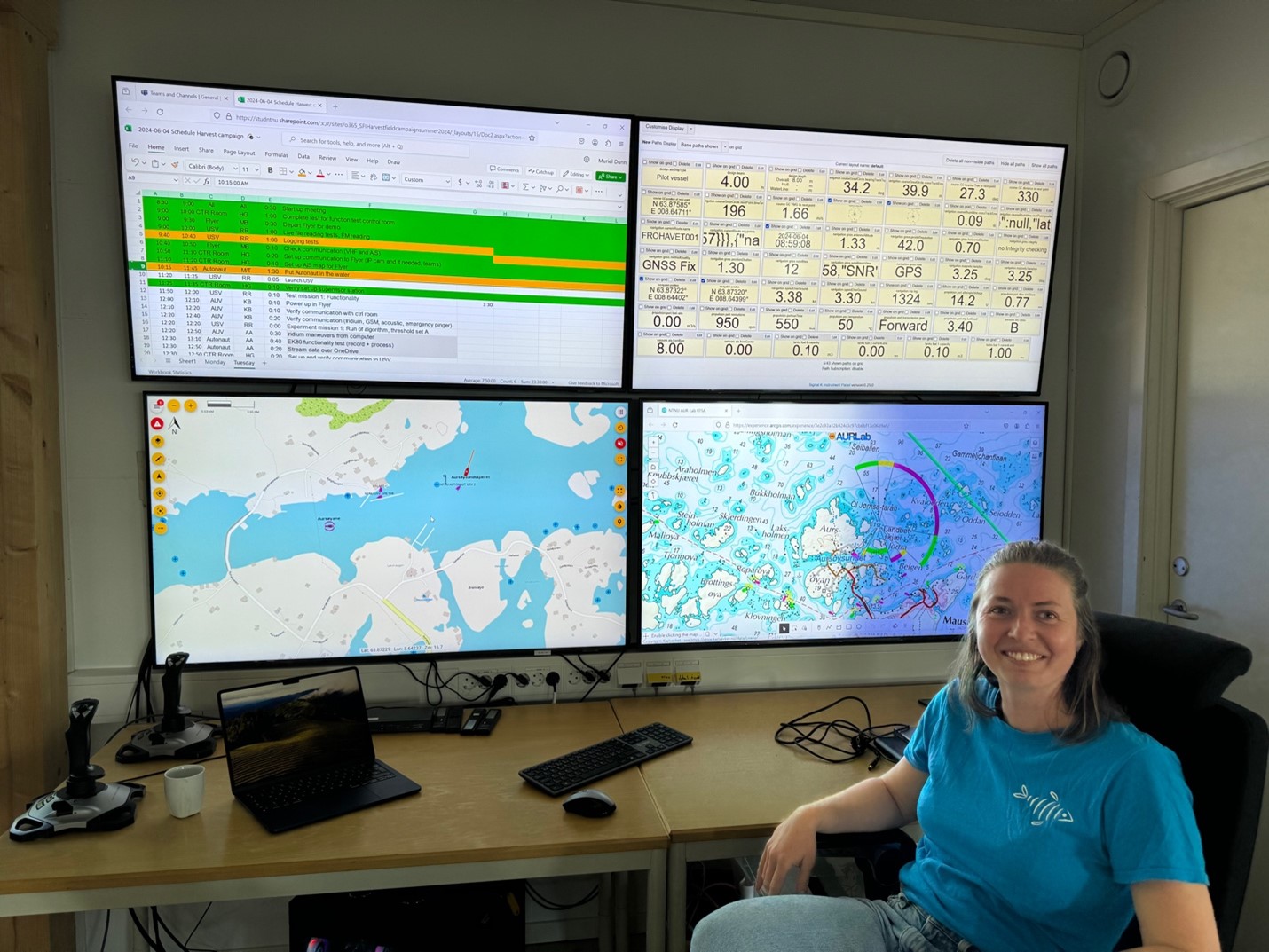
Meanwhile, back at TBS in Trondheim, a simple click of a mouse initiated the operations. The control room, a high-tech nerve centre, provided a comprehensive overview of the campaign.
A multitude of screens displayed video streams from the workboat, video calls with the field engineers, AIS plots, sea charts, and vehicle tracks, all while a supervisor updated the operation schedule in real-time, ensuring seamless coordination.
The mission’s progress and data were logged into an ArcGIS interactive map, enhancing coordination and tracking.

As researchers and engineers in underwater robotics and sensing, we must admit we cherish the opportunity to venture into the field and experience life at sea. However, this campaign exemplifies the future of zooplankton sensing with underwater robots – operating beyond the horizon.
The future of marine research
The remote operators and researchers could debug their code, prepare, plan, and re-plan operations without the discomforts of seasickness, sunburns, wet keyboards, and unreliable internet, and even without leaving their base in Trondheim.
This setup not only improves working conditions but also significantly cuts costs, saves time, reduces human risk, and allows robots to operate more efficiently, and in the future: persistently.
This campaign represents the future of marine research – leveraging advanced robotics and remote operations to achieve what was previously unimaginable.
The ability to conduct intricate and targeted sampling missions utilizing the strengths of each modality of robots allows for more frequent and efficient data collection.
A gateway to immense possibilities
This efficiency is crucial for timely and accurate monitoring of zooplankton populations, which plays a vital role in marine ecosystems and could be an important protein resource for a growing world population.
Moreover, the cooperative operation of multiple autonomous systems demonstrated during this campaign highlights the potential for even more complex and ambitious missions in the future.
The horizon is no longer a limit but a gateway to immense possibilities.
The campaign was financed by The Research Council of Norway through SFI Harvest, a centre for research-based innovation.









Comments
Very interesting and useful