

Zooplankton are small, planktonic animals that live in the water column, transported by ocean currents. They have some limited ability to migrate vertically up and down, and an ability to try ‘swim’ to escape prey.
Zooplankton play a vital role in maintaining the ecological balance and functioning of aquatic ecosystems by serving as a food source, and as indicators of environmental health.
In January we joined the University of Tromsø (UiT) on a field campaign across the Barents Sea in the Svalbard Fjords. Our goal was to use new sensors and robotic technology to take a close look at the ecosystem during the polar night.
Zooplankton in the Polar Night
Zooplankton are a sensitive part of the planktonic community. Sensitivity to light enables zooplankton to respond to environmental cues, avoid predation, optimize feeding strategies, and maintain their vital biological rhythms. During the Polar Night, if we go out with a huge ship emitting lots of light and sound into the ocean, we will scare them away or change their distribution within the water. One of our goals was to find out what zooplankton are scared of, and by doing so be able to optimise measurements using small robots to carry the sensors instead of large research ships.

Automating zooplankton measurements
Traditionally, zooplankton measurements have been carried out by winching a net from ships to collect them, and then count them. Zooplankton are very patchy, and this method is therefore very disturbing to the species as they will spread out when causing a disturbance.


We used Silcam, which is an in-situ particle imaging tool, and a AUV from the Norwegian Centre for Plankton Technology. We also used OceanLab’s zooplankton imager (UVP–6) for underwater profiling. The challenge was that you need light to take pictures under water, but the light scares the zooplankton away. It is however possible to see them with a combination of acoustics and imaging together. The SilCam and UVP–6 are image-based particle quantifiers, and we also used a LISST–100 which laser diffraction to quantify particle size. Together these instruments can quantify a particle size range from 2.5 microns to several millimeters, with overlaps in size ranges between the different instruments. This allows for estimations of particles in a large size range, and for comparison of the different instruments in the overlapping regions.
PhD work
Karoline Barstein, who is a PhD candidate in SFI Harvest participated on the cruise. The primary aim was to use EK80 (scientific echosounder) information on zooplankton scattering layer positions and depths to inform appropriate dive depths for AUV missions that would send a SilCam (high resolution imaging device) into the layer for measurement of copepod lengths and widths. The Kings Bay research boat, Teistein, supported this with ground-truthing profiles for net- and water- sampling for eDNA and SilCam profiles that would also target measurements below, in and above the zooplankton scattering layer found the Apherusa’s (UiT’s autonomous surface vessel) EK80 acoustic measurements.

A secondary goal of this was to try to capture echograms of the AUV flying through a zooplankton scattering layer, such that information about potential zooplankton avoidance of robots themselves flying through the water.
Going forward
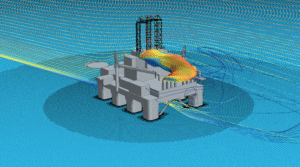
We are now working toward developing an approach for long-term persistence resource mapping of low-trophic level organisms, like copepods and krill. This will use a similar method to what we tested in the Polar Night, by combining surface gliders with EK80 echosounders, and undulating gliders with zooplankton imagers. Together this multi-platform and combing acoustics and imaging sensing will provide critical long-term mapping of these small organisms.
We would like to provide thanks to our collaborators at UiT for co-ordinating, and the University of Strathclyde, University of Memorial, NTNU, and Kings Bay for working with us on this field expedition.





Comments
No comments yet. Be the first to comment!